Posted inMotion Tracking and Gesture Recognition Layered Path Planning with Human Motion Detection for Autonomous Robots Posted by admin August 11, 2021 Autonomous and intelligent navigation in a dynamic and unstructured environment is a critical capability for…
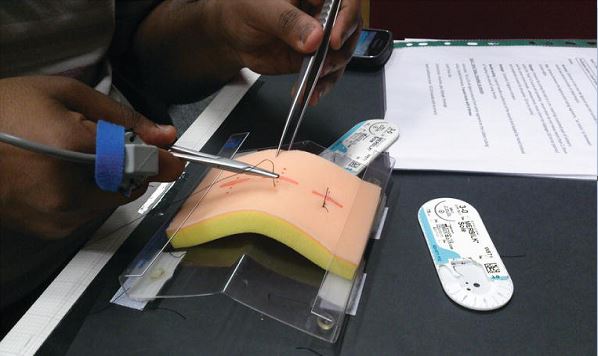
Posted inMotion Tracking and Gesture Recognition Motion Tracking System in Surgical Training Posted by admin August 11, 2021 THE CHALLENGES IN HEALTHCARE AND SURGICAL TRAINING The nature of surgical training is consistently evolving…
Posted inKinematics A Random Multi-Trajectory Generation Method for Online Emergency Threat Management (Analysis and Application in Path Planning Algorithm) Posted by admin August 11, 2021 Robot path planning have been witnessed a great achievement these years with the various application…
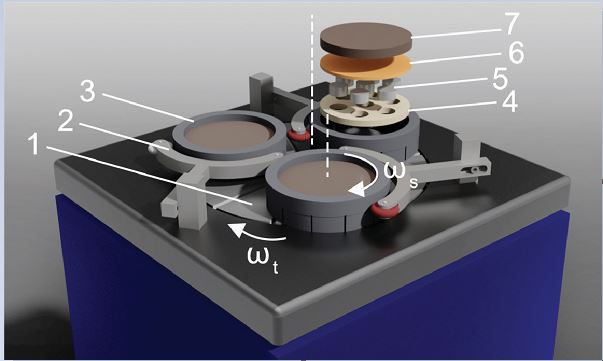
Posted inKinematics Optimization of Single-Sided Lapping Kinematics Based on Statistical Analysis of Abrasive Particles Trajectories Posted by admin August 11, 2021 Nowadays, products have to be manufactured with both high quality and efficiency. Finishing technologies that…
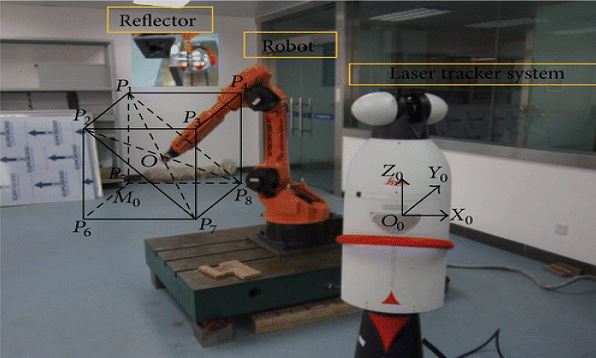
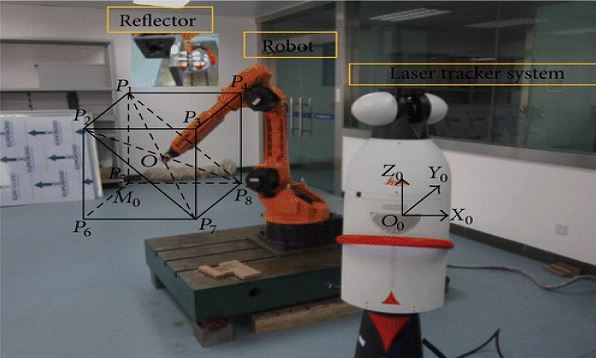
Posted inKinematics A New Methodology for Kinematic Parameter Identification in Laser Trackers Posted by admin August 11, 2021 The development of more accurate large-scale measurement systems is a critical need in the verification…
Posted inKinematics Kinematic Model for Project Scheduling with Constrained Resources Under Uncertainties Posted by admin August 11, 2021 Project scheduling problems have been well studied in the literature since the 1950s. According to…
Posted inKinematics Kinematic and Biodynamic Model of the Long Jump Technique Posted by admin August 11, 2021 The long jump consists of four interconnected phases: approach, take-off, flight and landing. According to…
Posted inKinematics Expanding the rotational workspace Posted by admin August 11, 2021 CONVENTIONAL METHODS In this section, methods for expanding the rotational workspace of the parallel robot…
Posted inKinematics How to Expand the Workspace of Parallel Robots Posted by admin August 11, 2021 The parallel robot has excellent characteristics such as high speed, high precision, and high rigidity.…
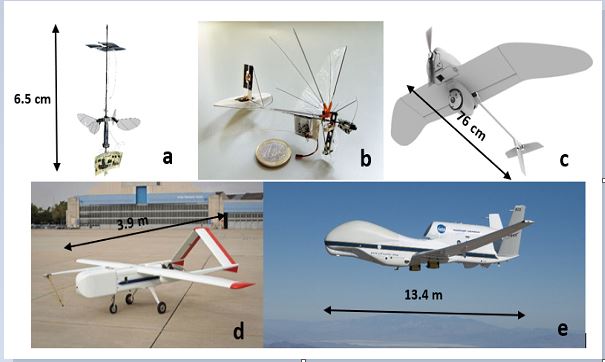
Posted inKinematics Path Planning in the Local-Level Frame for Small Unmanned Aircraft Systems Posted by admin August 11, 2021 The rapid growth of the unmanned aircraft systems (UASs) industry motivates the increasing demand to…