Servomotor Building Blocks for Robotics The servomotor brackets discussed in this chapter will allow you to create various servomotor robots and projects. Servomotors are ideal for powering robots. They are readily available in many sizes, are inexpensive, provide powerful torque for their size and weight, and are positional. The output shafts on most hobby servomotors are guaranteed positional between 0° and 90°. Most servomotors’ output shaft range extends past 90°,…
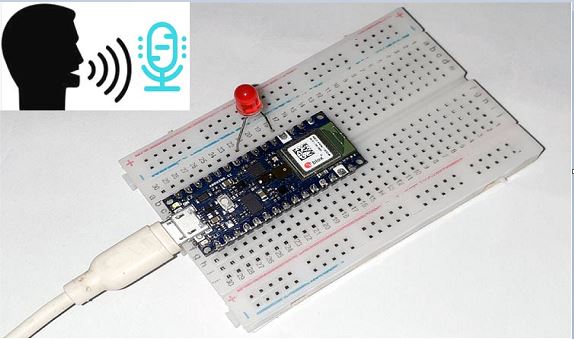
Before we can get into the nuts and bolts of how the interface circuit functions, we must look at the binary information output by the speech recognition circuit. The output of the speech recognition circuit consists of two 4bit binarycoded decimal (BCD) numbers. This binary (BCD) information is shown on the speech circuit’s two-digit digital display. Whenever a word is detected, the circuit uses the digital display to output the word number it has recognized, or else it outputs its unrecognized/error code. If the word detected is not recognized, the circuit will display one of the following error codes: Our interface design incorporates a PIC microcontroller. A preprogrammed microcontroller’s (16F84) first job is to determine if a…
The speech recognition circuit is available as a kit from Images SI Inc. You can purchase the main components, HM2007, SRAM, and printed circuit boards separately if you like and build from scratch. The kit takes a modular approach and uses three separate printed circuit (PC) boards. The three PC boards are the main circuit board containing the speech recognition circuit, digital display board,…
In the near future, speech will be the method for controlling appliances, toys, tools, computers, and robotics. There is a huge commercial market waiting for this technology to mature. Our speech recognition circuit is a standalone trainable speech recognition circuit that may be interfaced to control just about anything electrical. The interface circuit we will build in the second part of this chapter will allow this speech recognition circuit to control a variety of electrical devices such as appliances, test instruments, VCRs,…
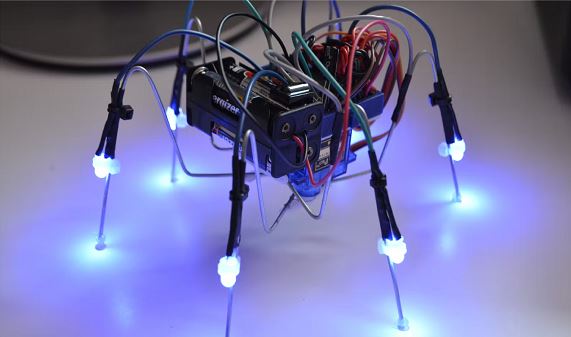
Legged walkers are a class of robots that imitate the locomotion of animals and insects, using legs. Legged robots have the potential to transverse rough terrains that are impassable by standard wheeled vehicles. It is with this in mind that robotics are developing walker robots. Imitation of Life Legged walkers may imitate the locomotion style of insects, crabs, and sometimes humans. Biped walkers are still a little rare, requiring balance and a good deal more engineering science than multilegged robots.…
In 1984 Valentino Braitenberg published a book titled Vehicles—Experiments in Synthetic Psychology. In his book Valentino describes a number of wondrous vehicles that exhibit interesting behaviors based on the use of a few electronic neurons Similar in concept to Walter’s seminal neural work with his robot tortoises, Valentino’s vehicle behavior is more straightforward, making it somewhat easier to follow both theoretically and logically. This also makes it easier to implement his ideas into real designs for robots. In this chapter we will build a few Braitenberg type vehicles. At the heart of Braitenberg vehicles is his description of a basic vehicle, which is a sensor connected to a motor.…