Mechatronics is combination or junction of Electrical, Mechanical, and Computer ScienceEngineering. Mechatronics is the closest to robotics with the slight and main difference in…
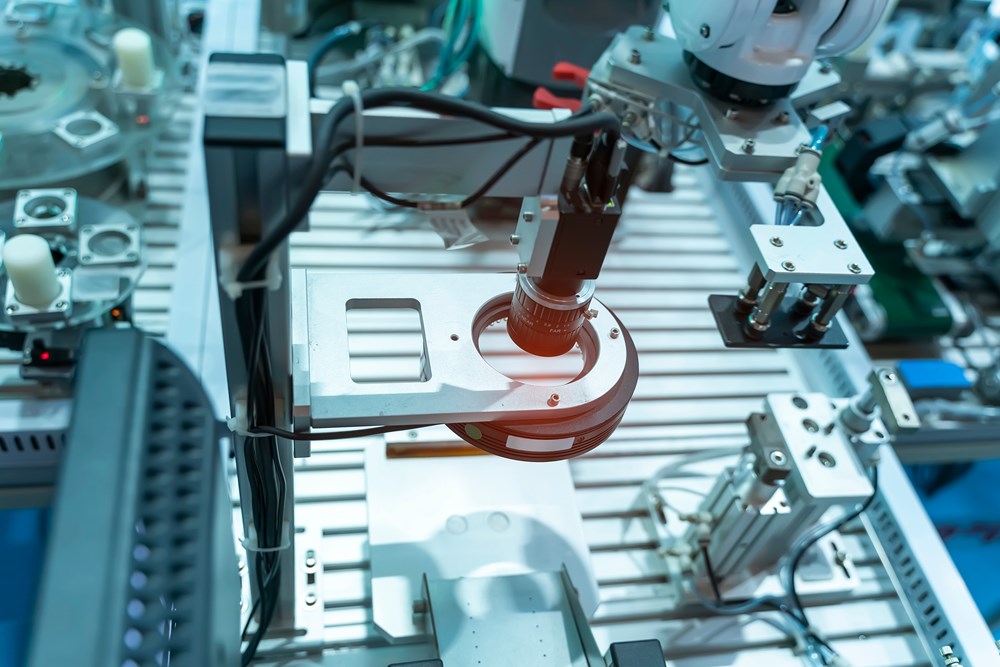
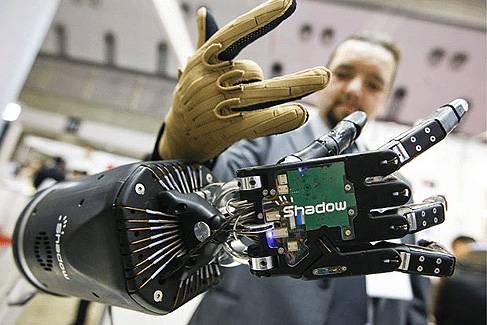
Today, various industrial robots are developed and used all over the world. However, these industrial robots are specialized in particular operations. In fact, one industrial robot is not able to be designed for operating various tasks. One of the causes is that general-purpose and multifunctional robot hands substituted human manual-handling task are not brought to realization. If these robot hands like human hands are consummated, the applicable field of industrial robots is extended, and the utilization efficiency is improved very much. A human hand has mechanical handling function such as grab, grip, pinch, push and pull. In addition, it can sense the feeling such as configuration, hard, flexible, smoothness and asperity. In other words, a human hand is a multifunctional and a universal end effector. Many research works on robot hand have been studied all over the world in order to imitate…
The purpose of this chapter is both to review the current state of the art in robotics and to identify some of the challenges that the field has yet to face. This is done and illustrated by following an imaginary roboticist, Rob, who is currently designing a new humanoid robot from scratch. Rob’s ultimate vision is that this robot will be humanoid in the sense that it possesses the abilities of a human being. Therefore, his initial aim is to identify relevant work as well as areas in which innovations are still needed. Research in robotics has come a long way in the last few decades, whether one considers humanoids specifically or just …