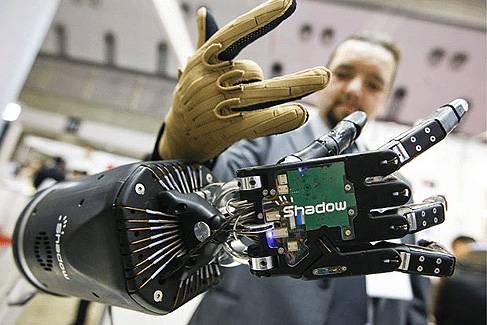
Today, various industrial robots are developed and used all over the world. However, these industrial robots are specialized in particular operations. In fact, one industrial robot is not able to be designed for operating various tasks. One of the causes is that general-purpose and multifunctional robot hands substituted human manual-handling task are not brought to realization. If these robot hands like human hands are consummated, the applicable field of industrial robots is extended, and the utilization efficiency is improved very much. A human hand has mechanical handling function such as grab, grip, pinch, push and pull. In addition, it can sense the feeling such as configuration, hard, flexible, smoothness and asperity. In other words, a human hand is a multifunctional and a universal end effector. Many research works on robot hand have been studied all over the world in order to imitate…
The purpose of this chapter is both to review the current state of the art in robotics and to identify some of the challenges that the field has yet to face. This is done and illustrated by following an imaginary roboticist, Rob, who is currently designing a new humanoid robot from scratch. Rob’s ultimate vision is that this robot will be humanoid in the sense that it possesses the abilities of a human being. Therefore, his initial aim is to identify relevant work as well as areas in which innovations are still needed. Research in robotics has come a long way in the last few decades, whether one considers humanoids specifically or just …
The ability to efficiently move in a complex environment is a key property of animals. It is central to their survival, i.e. to avoid predators, to look for food, and to find mates for reproduction (Ijspeert, 2008). Nature has found different solutions for the problem of legged locomotion. For example, the vertebrate animals have a spinal column and one or two pairs of limbs that are used for walking. Arthropoda animals are characterized by a segmented body that is covered by a jointed external skeleton (exoskeleton), with paired jointed limbs on each segment and they can have a high number of limbs (Carbone & Ceccarelli,2005). The biological mechanisms underlaying locomotion have therefore been extensively studied by neurobiologists, and in recent years there has been an increase in the use of computer simulations for testing and investigating models of locomotor circuits based on neurobiological observations (Ijspeert, 2001). However, the mechanisms generating the complex motion patterns performed by animals are still not well understood (Manoonpong,2007). Animal locomotion, for instance, requires multi-dimensional coordinated rhythmic patterns that need to be correctly tuned so as to satisfy multiple constraints: the capacity to generate forward motion, with low energy, without falling over, while adapting to possibly complex terrain (uneven ground, obstacles), and while allowing the modulation of speed and direction (Ijspeert & Crespi, 2007). In vertebrate animals, an essential building block of the locomotion controller is the Central Pattern Generator (CPG) located in the spinal cord. The CPG is a neural circuit capable of producing coordinated patterns of rhythmic activity in open loop, i.e. without any rhythmic inputs from sensory feedback or from higher control centers (Delcomyn, 1980; Grillner, 1985). Interestingly, very simple input signals are sufficient to modulate the produced patterns. Furthermore, CPG can adapt to various environments by changing the periodic rhythmic patterns. For instance, the cats and horses are able to change their locomotor patterns depending on the situation. This relevance of locomotion both for biology and for robotics has led to multiple interesting interactions between the two fields. The interactions have mainly been in…