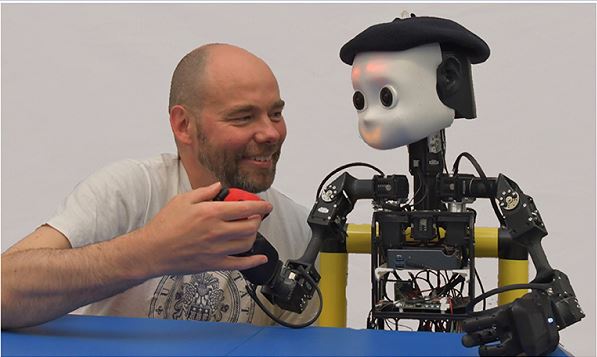
Humanoid robots are becoming increasingly competent in perception of their surroundings and in providing intelligent responses to worldly events. A popular paradigm to realize such responses is the idea of attention itself. There are two important aspects of attention in the context of humanoid robots. First, perception describes how to design the sensory system to filter out useful salient features in the sensory field and perform subsequent higher level processing to perform tasks such as face recognition. Second, the behavioral response defines how the humanoid should act when it encounters the salient features. A model of attention enables the humanoid to achieve a semblance of liveliness that goes beyond exhibiting a mechanized repertoire of responses. It also facilitates progress in realizing models of higher-level cognitive processes such as having people direct the robot’s attention to a specific target stimulus(Cynthia et al., 2001). Studies indicate that humans …
Interaction Through Cognitive Architecture Development of humanoid robots has to address two vital aspects, namely physical appearance and gestures, that will allow the machines to closely resemble humans. Other aspects such as "social" and "emotional" will enable human-machine interaction to be as natural as possible. The field of robotics has long been investigating how effective interaction between humans and autonomous and intelligent mechanical system can be possible (Goodrich & Schultz., 2007). Several distinctive features have been determined depending on whether a robot that acts as an assistant (for example, in the course of a business) or as a companion is …
There have been many researches of robot hands in robot fields and they have been considered one of the most complicated area. There are many reasons why researches of robotic hand are difficult, and these are from complicated structures and functions of hands. There are many types of robotic hands in robotics area, but they can be classified to major…
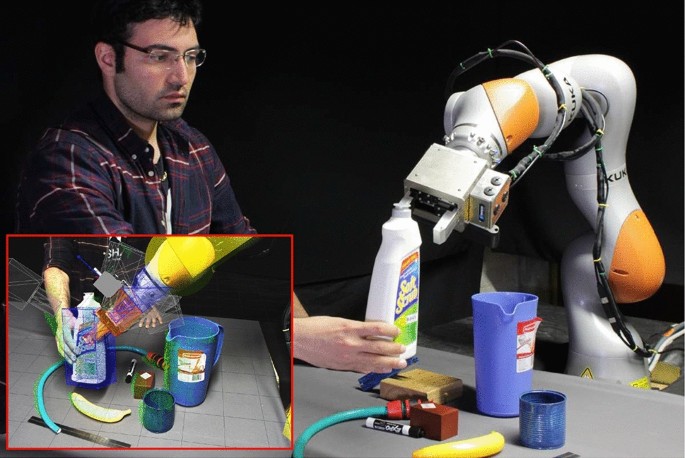
We focus on grasp planning for a humanoid multi-fingered hand attached at the tip of a humanoid robot’s arm. The hand has potential possibility to grasp various objects under several situations. Since the multi-fingered hand can use several grasp types such as fingertip grasp, and envelope grasp with taking the advantage of degrees of freedom. We develop grasp planner which selects a feasible grasp type based on the task, and determines contact positions for the fingers and the grasped object surface so that the fingers do not drop the object while staying with limited actuator capacity. To grasp an object, the robot first measures object position/orientation using vision sensor. Then, the planner plans the body motion to complete the grasping task based on vision sensor information. Even when the object’s location is not known beforehand, the robot should complete the grasping task as fast as possible. However, grasp planning with a humanoid robot is complex and often requires long calculation time. Hence, for the grasp planning, a heuristic but fast algorithm is preferred rather than precise but slow algorithms (Shimoga (1989)). Our planner calculates grasp motions within reasonable time by using predefined grasp types which are assigned with contacting finger links, desired sizes of the grasped object. Our planner selects a grasp type according to position/orientation of the grasped object similar to a human. As shown in Fig. 1 , a human grasps the side of the can with all fingers, grasps the top with fewer fingers. Failing to find feasible grasping posture using arm/hand kinematics alone, our planner attempts to do so using the full body kinematics. Using the degrees of freedom of full body, the planner has adaptable for reaching the object with the several motions such as twisting waist, bending waist, and squatting down. We demonstrate effectiveness of grasp planning through simulation and experimental results by using humanoid robot HRP-3P (Akachi et al. (2005)) shown in Fig. 2, which has a…
It is expected that humanoid robots provide various services to help human daily life such as household works, home security, medical care, welfare and so on(Dominey et al.,2007; Okada et al., 2003; 2005). In order to provide various services, humanoids have multi degree-of-freedom(DOF), sophisticated and complicated structure. These humanoid robots will work under human living environments which are not definable beforehand. So humanoids have to provide their given services under not only the designed environments but also unknown environments. Under unknown environments, robots cannot perform as planned, and they may fall or collide with obstacles. These impacts will wreak several unexpected structure changes such as gear cracks, joint locking, frame distortions and so on. Because of the designed motions are optimized to the robot structure, if the robot structure has changed, the services from robots cannot be provided. Because general users have no expertise knowledge of robots, thus, quick repairs under human living environments cannot be expected. Even in that case, it is expected that the robots should provide services to help human daily life as possible. In the case the humanoid robots cannot get rapid repair service, they have to provide the desired services with their broken body. In addition, using tools to provide some services can be considered as one of the structure changes. Therefore, it is necessary for future humanoids to obtain new motions which can provide the required services with changed structure. We propose an autonomous motion adaptation method which can be applied to sophisticated and complicated robots represented by humanoids. As a first step, we deal with the simple services based on trajectory control; services can be provided by following the correct path designed by experts. When robot structure has changed, achieving the designed trajectories on changed structure is needed. As the conventional methods, there are two typical approaches. One is the method based on model identification (El-Salam et al., 2005; Groom et al., 1999). Robots locate the occurred changes, identify the changed structure, recalculate inverse kinematics, and then obtain the proper motions. If the changed structure is identified, inverse kinematics leads the proper motions for new properties of changed structure. However, it is so difficult to identify the complicated structure changes in sophisticated robots. In additions, the available solving methods of inverse kinematics for multi DOF robots is non-existent according to the reference (The Robotics Society of Japan, 2005). So model identification method cannot be applied for humanoids. Another approach is the exploration method (Peters & Schaal, 2007); finding the new motions achieving the desired trajectories after structure has changed. In order to obtain the proper motions achieving the desired trajectories, joint angles are varied by trial and error. Injured robots will obtain the proper motions without complicated model identification, but this approach needs huge exploration costs. New motion adaptation method with low exploration costs and without model identification is needed. In this paper, we show one approach to adapt designed motions to changed structure without model identification. Proposed methods We …
One of the central issues in robotics and animal motor control is the problem of trajectory generation and modulation. Since in many cases trajectories have to be modified on-line when goals are changed, obstacles are encountered, or when external perturbations occur, the notions of trajectory generation and trajectory modulation are tightly coupled. This chapter addresses some of the issues related to trajectory generation and modulation, including the supervised learning of periodic trajectories, and with an emphasis on the learning of the frequency and achieving and maintaining synchronization to external signals. Other addressed issues include robust movement execution despite external perturbations, modulation of the trajectory to reuse it under modified conditions and adaptation of the learned trajectory based on measured force information. Different experimental scenarios on various robotic platforms are described.…