Posted inBasics Differential Motion Posted by admin August 11, 2021 In the previous chapter, the position and orientation of the manipulator end-effecter were evaluated in…
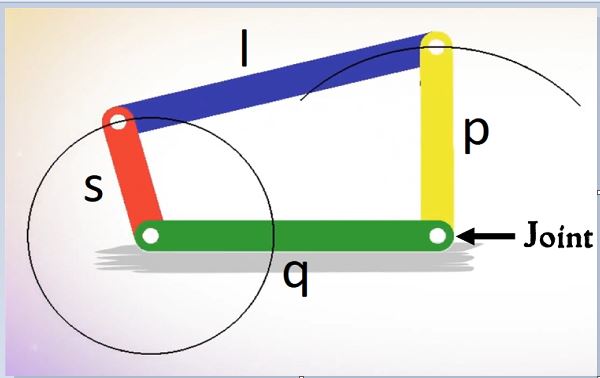
Posted inBasics Kinematics of Parallel Link Mechanisms Posted by admin August 11, 2021 Consider the five-bar-link planar robot arm Note that Joint 2 is a passive joint. Hence,…
Posted inBasics Inverse Kinematics of Planar Mechanisms Posted by admin August 11, 2021 The vector kinematic equation derived in the previous section provides the functional relationship between the…
Posted inBasics Planar Kinematics Posted by admin August 11, 2021 Kinematics is Geometry of Motion. It is one of the most fundamental disciplines in robotics,…
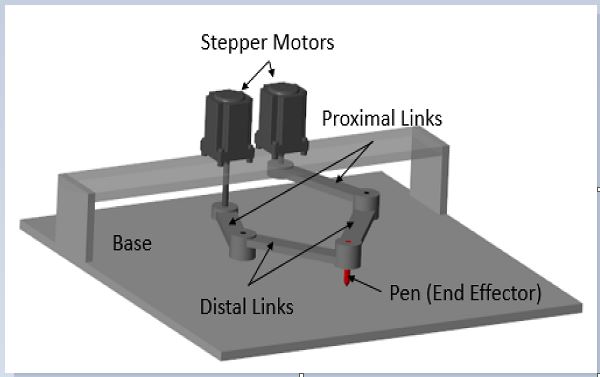
Posted inBasics Parallel Linkages Posted by admin August 11, 2021 Primitive joints can be arranged in parallel as well as in series. Figure 3.2.1 illustrates…
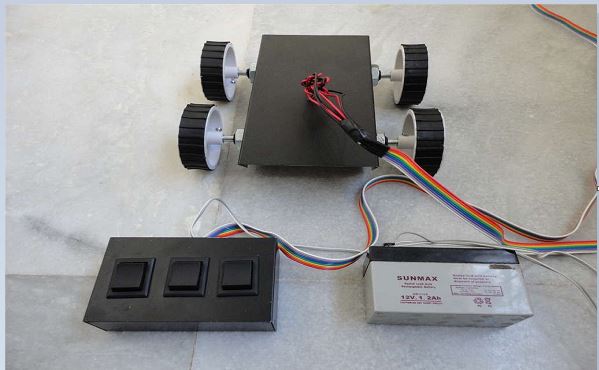
Posted inBasics Robot Mechanisms Posted by admin August 11, 2021 A robot is a machine capable of physical motion for interacting with the environment. Physical…
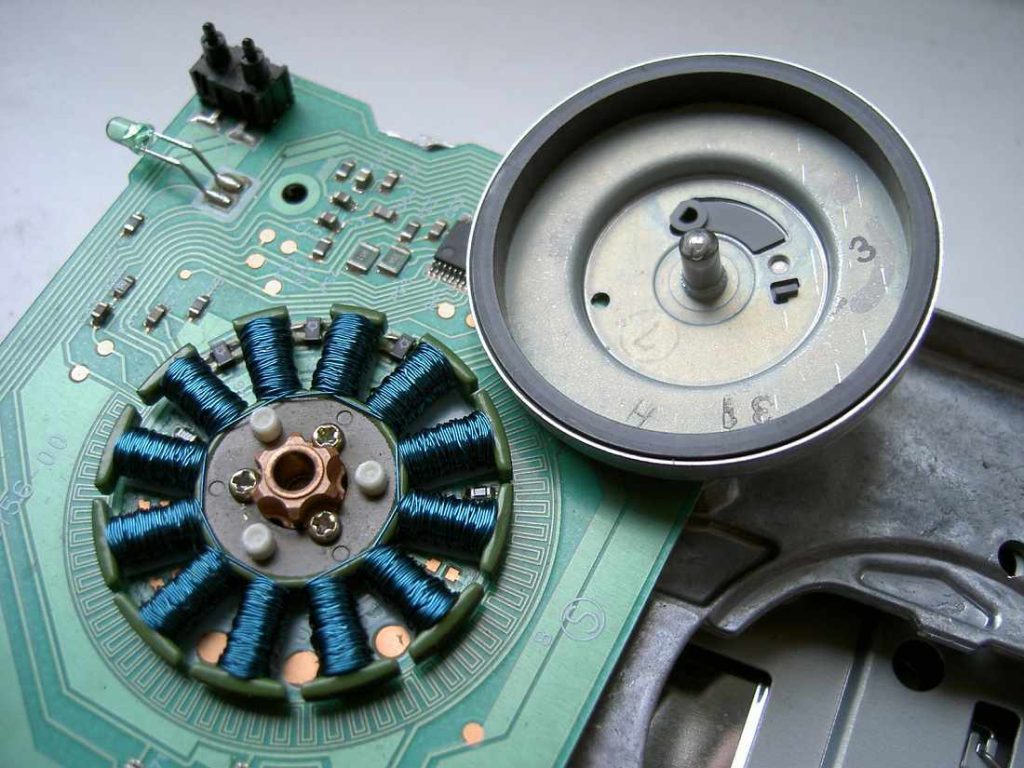
Posted inBasics Brushless Dc Motors Posted by admin August 11, 2021 The DC motor described in the previous section is the simplest, yet efficient motor among…
Posted inBasics Optical Shaft Encoders Posted by admin August 11, 2021 The servomechanism described in the previous section is based on analogue feedback technology, using a…
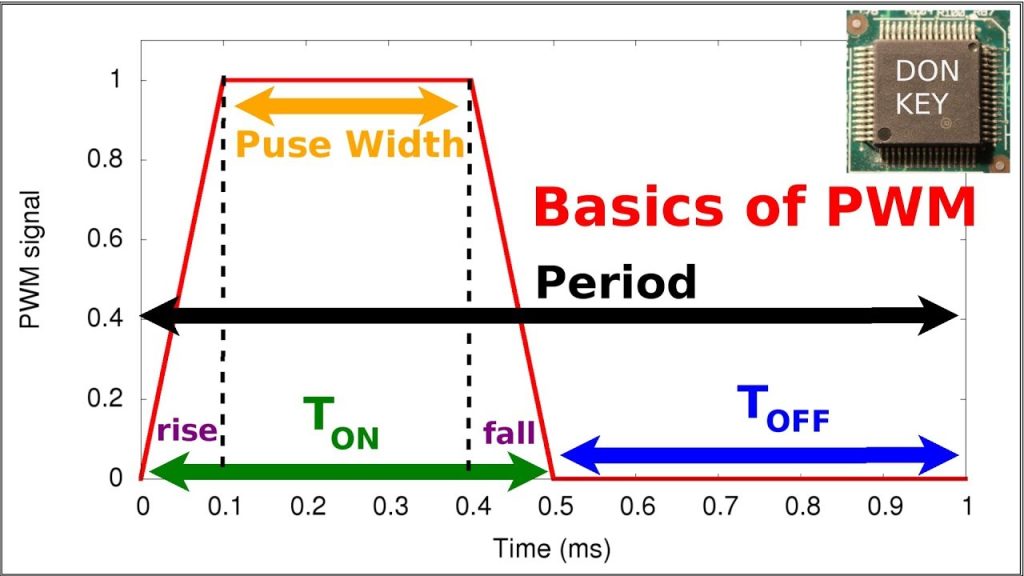
Posted inBasics PWM switching characteristics Posted by admin August 11, 2021 As the PWM frequency increases, the current driven to the motor becomes smoother, and the…
Posted inBasics Dynamics of Single-Axis Drive Systems Posted by admin August 11, 2021 DC motors and other types of actuators are used to drive individual axes of a…