Posted inBasics Architecture of Hybrid Position/Force Control System Posted by admin August 11, 2021 Based on Mason’s Principle, a hybrid position/force control system can be constructed in such a…
Posted inBasics Force and Compliance Controls Posted by admin August 11, 2021 A class of simple tasks may need only trajectory control where the robot end-effecter is…
Posted inBasics Inertia Matrix Posted by admin August 11, 2021 In this section we will extend Lagrange’s equations of motion obtained for the two d.o.f.…
Posted inBasics Lagrangian Formulation of Robot Dynamics Posted by admin August 11, 2021 Lagrangian Dynamics In the Newton-Euler formulation, the equations of motion are derived from Newton's Second…
Posted inBasics Physical Interpretation of the Dynamic Equations Posted by admin August 11, 2021 In this section, we interpret the physical meaning of each term involved in the closed…
Posted inBasics Dynamics Posted by admin August 11, 2021 In this chapter, we analyze the dynamic behavior of robot mechanisms. The dynamic behavior is…
Posted inBasics Duality of Differential Kinematics and Statics Posted by admin August 11, 2021 We have found that the equivalent joint torques are related to the endpoint force by…
Posted inBasics Statics Posted by admin August 11, 2021 Robots physically interact with the environment through mechanical contacts. Mating work pieces in a robotic…
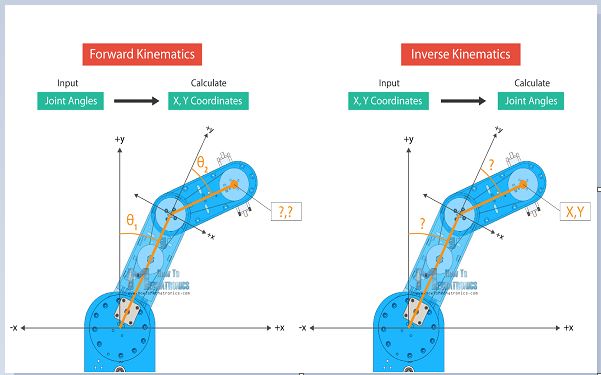
Posted inBasics Inverse Kinematics of Differential Motion Posted by admin August 11, 2021 Now that we know the basic properties of the Jacobian, we are ready to formulate…
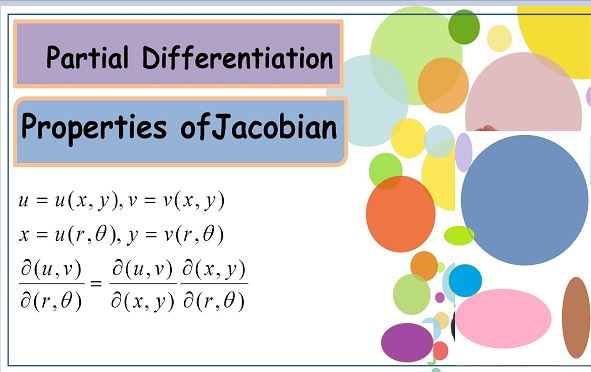
Posted inBasics Properties of the Jacobian Posted by admin August 11, 2021 The Jacobian plays an important role in the analysis, design, and control of robotic systems.…