In Robotics Engineering, path planning and navigation algorithms are essential components that enable robots to move autonomously. Whether it’s a robot vacuum navigating around obstacles or an autonomous car finding the shortest route to a destination, these algorithms play a critical role. In this article, we will explore the basic concepts, algorithms, and challenges involved in path planning and navigation in robotics.
1. What is Path Planning?
Path planning refers to the process of finding a feasible path from a robot’s current position to its target destination while avoiding obstacles. It aims to optimize certain parameters like distance, time, or energy consumption, ensuring smooth and safe movement.
There are two main types of path planning:
- Global Path Planning – The entire map is known in advance, and the robot computes an optimal path.
- Local Path Planning – The robot relies on real-time sensor data to avoid obstacles while moving toward the goal.
2. Key Elements of Path Planning and Navigation
Several components play an essential role in robotic path planning:
- Environment Representation – The environment can be represented using grids, graphs, or maps (e.g., occupancy grids or topological maps).
- Sensors – Sensors like LiDAR, ultrasonic sensors, and cameras collect data on the environment.
- Actuators – These control the robot’s wheels, arms, or other moving parts.
- Algorithms – Pathfinding algorithms compute the most efficient path to the destination.
- Localization – Determines the robot’s current position within the environment.
3. Popular Algorithms for Path Planning
Several algorithms are commonly used in robotics for path planning. Below are some of the most popular ones:
A (A-star) Algorithm*
- One of the most widely used pathfinding algorithms.
- It combines elements of Dijkstra’s algorithm and heuristic search to find the shortest path.
- How it Works: The algorithm maintains a list of nodes to explore, choosing nodes based on the total cost from the start and an estimated cost to the goal.
Dijkstra’s Algorithm
- An algorithm focused on finding the shortest path between nodes in a graph.
- It explores all possible paths to ensure the optimal solution, but it can be computationally intensive.
Rapidly-Exploring Random Trees (RRT)
- RRT is particularly useful for robots operating in high-dimensional spaces.
- How it Works: It grows a tree of random paths from the start node and tries to connect it to the target node.
D Algorithm (Dynamic A-star)*
- Suitable for dynamic environments where obstacles can move or change.
- It adapts to environmental changes by recalculating paths as needed.
4. Path Planning Challenges
Robots face several challenges during navigation:
- Obstacle Avoidance – Detecting and avoiding both stationary and moving obstacles.
- Real-Time Path Updates – Re-planning the path when new obstacles are detected.
- Dynamic Environments – Navigating through spaces where conditions constantly change.
- Energy Constraints – Optimizing paths to reduce energy consumption for battery-powered robots.
- Localization Errors – Inaccurate positioning can lead to incorrect path execution.
5. Tools for Path Planning in Robotics
Several software frameworks and libraries assist with path planning and navigation:
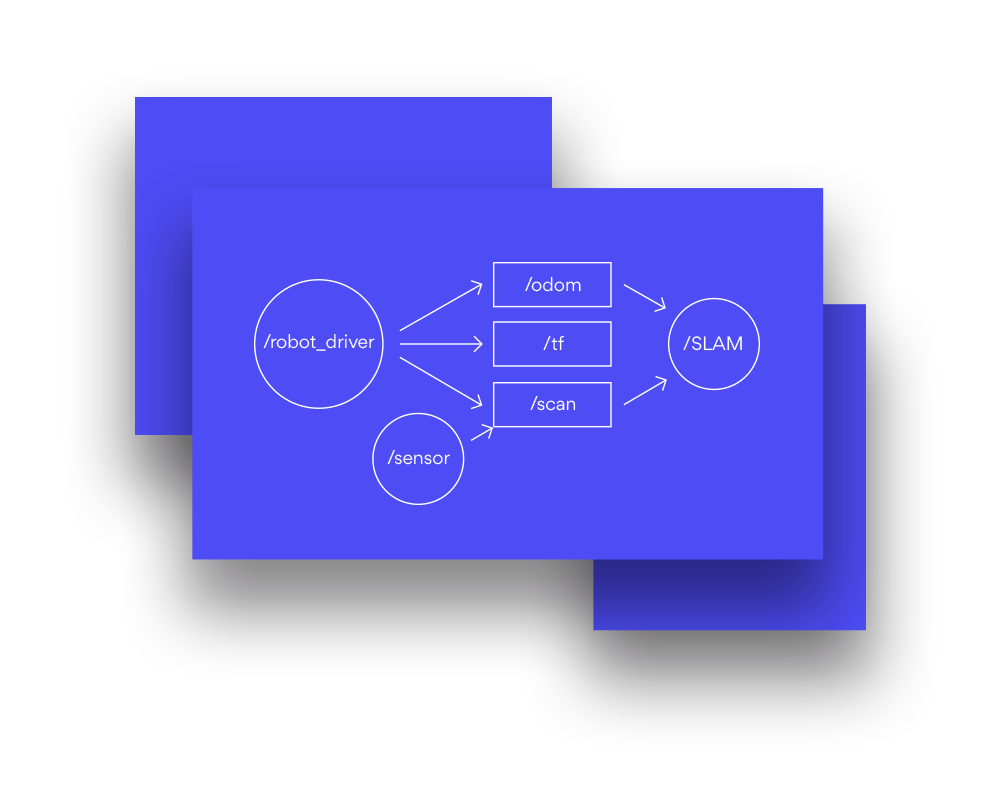
- ROS (Robot Operating System) – A flexible framework that provides tools and libraries for developing robotic algorithms.
- OpenCV – Used for computer vision tasks in navigation.
- Gazebo and RViz – Simulation tools for testing path planning algorithms before deployment.
6. Example: Implementing A Algorithm in Python*
Below is a simple example of the A* algorithm in Python for a robot navigating on a 2D grid:
import heapq
class Node:
def __init__(self, position, cost):
self.position = position
self.cost = cost
def __lt__(self, other):
return self.cost < other.cost
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star(grid, start, goal):
rows, cols = len(grid), len(grid[0])
open_list = []
heapq.heappush(open_list, Node(start, 0))
came_from = {}
cost_so_far = {start: 0}
while open_list:
current = heapq.heappop(open_list).position
if current == goal:
path = []
while current != start:
path.append(current)
current = came_from[current]
path.append(start)
return path[::-1]
for dx, dy in [(-1, 0), (1, 0), (0, -1), (0, 1)]:
neighbor = (current[0] + dx, current[1] + dy)
if 0 <= neighbor[0] < rows and 0 <= neighbor[1] < cols and grid[neighbor[0]][neighbor[1]] == 0:
new_cost = cost_so_far[current] + 1
if neighbor not in cost_so_far or new_cost < cost_so_far[neighbor]:
cost_so_far[neighbor] = new_cost
priority = new_cost + heuristic(goal, neighbor)
heapq.heappush(open_list, Node(neighbor, priority))
came_from[neighbor] = current
return None
# Example usage
grid = [
[0, 1, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 1, 0],
[1, 1, 0, 0, 0],
[0, 0, 0, 1, 0]
]
start = (0, 0)
goal = (4, 4)
path = a_star(grid, start, goal)
print("Path:", path)
This code demonstrates how a robot can find the shortest path on a grid using the A* algorithm.
7. Future of Path Planning and Navigation in Robotics
Path planning continues to evolve as new technologies like AI, machine learning, and quantum computing emerge. Future advancements will focus on improving real-time navigation in dynamic environments, making robots more efficient, adaptive, and capable of interacting with humans and other robots seamlessly.
Conclusion
Path planning and navigation are crucial elements of Robotics Engineering, enabling robots to move autonomously in various environments. With a solid understanding of algorithms like A*, Dijkstra, and RRT, robotics enthusiasts and engineers can design robots capable of efficient movement. As technology advances, we can expect even more sophisticated navigation systems to enhance the capabilities of autonomous robots.

