Assistive robots, with which users can interact directly, have attracted worldwide attention. They can assist people with disabilities and older persons in the activities of daily living. Assistive robots could be employed for improving quality of life as they can be adjusted according to demographic changes. There are several crucial issues to be considered with regard to these robots, such as customizing them according to the specific culture of the users as well as ensuring cost-effectiveness (Mann, 2005).
In Korea, the official number of registered people with disabilities due to illnesses, injuries, and the natural aging process has already exceeded two million (Employment Development Institute, 2009). More than one-third of these disabled people are the elderly. Moreover, due to longer life spans and a decline in birthrate, the elderly make up over 10% of the population in Korea. As a result, effective caregiving with restricted resources is an urgent problem.
In order to achieve efficient caregiving for people with disabilities and elderly persons, caregivers should physically interact with the people. For example, caregivers have to assist people in performing the routine activities of their daily lives, such as eating, changing clothes, changing their posture, moving from one location to another, and bathing. Among these activities, eating meals is one of the most essential daily activities. In this regard, caregivers must interact with people frequently to assist with food selection, feeding interval, etc. Existing robotic technologies can be utilized to take over the functions of the caregivers. Thus, assistive robots represent one of the solutions by which disabled or elderly people can receive support for performing the activities of daily life.
The design of assistive robots to help with self-feeding depends strongly on the specific culture of the user. Korean food consists chiefly of boiled rice, soup, and side dishes such as Kimchi. The procedure of having a meal is as follows: the user eats the boiled rice first and then the side dishes. These steps are performed repetitively. In comparison with foreign boiled rice, Korean boiled rice sticks together very well after cooking. Handling this sticky boiled rice can be problematic. In addition, Korean soup includes meat, noodles, and various vegetables, thus the existing feeding robots find it difficult to handle Korean foods. Various assistive robots have been developed since the late 1980s, as shown in Fig. 1. Handy1 (Topping & Smith, 1999) is an assistive robot for daily activities such as eating, drinking, washing, shaving, teeth cleaning, and applying make-up. Handy1 consists of a five-DOF (degree-of-freedom) robot, a gripper, and a tray unit. The major function of Handy1 is to help with eating. Handy1 allows a user to select food from any part of the tray. A cup is attached to enable users to drink water with their meal. The walled columns of a food dish serve an important purpose: the food can be scooped on to the dish without any resultant mixing of food items.

(a) Handy1 (b) Winsford feeder (c) Neater Eater

(d) My Spoon (e) Meal Buddy (f) Mealtime Partner
Dining System
Fig. 1. Feeding systems
The Winsford feeder (Sammons Preston; Hermann et al., 1999) is a mechanical self-feeding system. It uses a mechanical pusher to fill a spoon and a pivoting arm to raise the spoon to the user’s mouth that is at a preset position. The plate is rotated to place more food in front of the pusher. The user can choose from two input devices: a chin switch and a rocker switch. Neater Eater (Neater Solutions) has two versions: a manual–operation-type and an automatic-operation-type system. Neater Eater consists of a two-DOF arm and one dish. Two types of food can be present on the one dish. The manual type can be used to suppress the tremors of a user’s upper limbs while he or she eats.
My Spoon (Soyama et al., 2003) is suitable in the case of Japanese food. It consists of a five- DOF manipulator, a gripper, and a meal tray. The meal tray has four rectangular cells. My Spoon combines several pre-programmed motions: automatic operation, semiautomatic operation, and manual operation. The semiautomatic operation allows a user to select food. The manual operation can change the position in which the food is held. The input device can be selected from among the following: the chin joystick, reinforcement joystick, and switch. The end-effector of the robotic arm has one spoon and one fork, which move together to realize the grasping motion. During the grasping process, the gap between the spoon and the fork changes and thus the end-effector grasps the food. Then the robot moves to a predefined position in front of the user’s mouth, and the fork moves backward to enable the user to eat the food off the spoon.
Meal Buddy (Sammons Preston) has a three-DOF robotic arm and three bowls that can be mounted on a board using magnets. After the system scoops the food, the robotic arm scrapes the surplus food off the spoon with the rod on the bowls.
The Mealtime Partner Dining System (Mealtime Partners) is positioned in front of a user’s mouth. Three bowls can rotate in front of the mouth. The spoon picks up the food and then moves a short distance toward the preset location of the mouth. This system reduces the chances of the spoon slipping on wet food because the underside of the spoon is wiped off after scooping. Because of the way the system is positioned, the user does not need to lean toward the feeder. In some systems, a beverage straw is located beside the spoon (Pourmohammadali, 2007). Other systems are designed for multiple users (Guglielmelli,2009).
Most feeding systems scoop the food with a spoon. Those systems are not suitable for use in the case of boiled rice, which is a staple food in Korea. In addition, some systems have a single dish, and thus different types of food might be mixed during scooping. My Spoon uses the grasping function to pick up food, but this system has difficulty serving Korean rice due to its fixed grasping strength and the grasping openness of the gripper. As a result, My Spoon’s gripper sometimes gets a lot of rice attached to its surface. The previously mentioned self-feeding robotic systems also have difficulty scooping this staple Korean food.
Feeding robots enable users to enjoy food independently during mealtimes. After preparing food, users can choose when they want to eat the desired food. We developed an assistive robot for self-feeding by taking into consideration the feedback of user candidates and clinical experts. We evaluated the self-feeding robot by performing a series of user tests. The overall process, i.e., formulating a concept, design, and evaluation involves feedback from users and clinical experts. The development process is performed on the basis of the philosophy of participatory action design (Ding et al., 2007).
In this paper, we introduce a newly designed self-feeding robot that will be suitable in the case of Korean food, including sticky rice, and we report the results of tests that were performed with several disabled people. In Section 2, we will present an overview of the new self-feeding robot for Korean food. Basic operational procedures of the self-feeding robot will be presented in Section 3. Section 4 contains the results and discussions of tests performed with users with spinal cord injuries. Finally, we will present the conclusion in Section 5.
Self-feeding robot system
In this section, we will present an overview of the users, requirements, and system configurations of the self-feeding robot system.
Users
The primary users of self-feeding robots are people with physical disabilities who have difficulty moving their upper limbs. Such people include those suffering from high-level spinal cord injuries, cerebral palsy, and muscular diseases. For example, people with cervical level-4 spinal cord injuries have difficulty moving their upper limbs and retain full movement only above their necks. Some people afflicted with cerebral palsy cannot move their arms and hands, and they often have difficulty moving their necks. When the spoon of a self-feeding robot approaches such a user’s mouth, that person has a hard time putting the food in his or her mouth. People with muscular diseases have weak muscle movements. Even though they can move their hands, they have limited motor functions in their elbows and shoulder joints. We can also include senior citizens who have difficulties with the motor functions of their upper limbs, e.g., the fragile elderly, among the abovementioned disabled people. It is clear that the number of overall target users of self-feeding robots will be growing in the near future.
Requirements of a self-feeding robot
We surveyed a group of people with disabilities as well as clinical experts to learn about the requirements of a feeding robot (Song et al., 2010a, 2010b). The focus group consisted of a person with a spinal cord injury and a person with cerebral palsy. The clinical experts included occupational therapists and medical doctors of physical medicine and rehabilitation.
The major findings of the survey are as follows. Firstly, a user should be able to control the feeding interval for the desired food. In the case of caregiving, one of the common problems is the difficulty in controlling the feeding interval. People with spinal cord injury are able to talk quickly and can therefore manage a short feeding interval. However, people with cerebral palsy have difficulty representing their intentions quickly when the feeding interval is too short.

Fig. 2. Korean food on a standard food container. (From the lower left-hand side going counterclockwise: rice, soup, and side dishes.)
Secondly, the specialists and the user candidates believe that the feeding systems are designed more for western-style food. Those systems are not suitable for Korean food, which includes boiled rice, soup, and side dishes. A user eats one of the side dishes and then the boiled rice in turn. These steps are performed repetitively during mealtime. In comparison with foreign boiled rice, Korean boiled rice sticks together very well after cooking. One of the problems of self-feeding systems is handling this sticky boiled rice. In addition, Korean soup includes meat, noodles, and various vegetables. Therefore, existing feeding robots have difficulty handling Korean foods (Fig. 2).
Thirdly, a feeding robot should be suitable for use in private homes and facilities. From an economic point of view, a feeding robot is effective in facilities that have many persons with upper-limb disability. Such facilities do not have enough caregivers to help with feeding due to the heavily time-consuming nature of this task. Thus, a robot reduces the burden of caregiving for feeding. A feeding robot can also be used in an ordinary home to improve the quality of life of the users and their families. Members of a family can face each other and freely enjoy talking. The other members of the family can go out for a few hours because they are freed from the burden of having to help with feeding.
The location of bowls or a tray is another important factor. According to Korean culture, the location of bowls or a tray is strongly related to the dignity of the person. A simple feeding system can be made with the bowls located in front of a user’s mouth. However, some senior user candidates hate having the bowls right in front of their mouth; they prefer to eat the food like ordinary people. Thus, we focus mainly on using a tabletop tray.
Other comments of user candidates are as follows: plain machines that can serve simple dishes with water are required. When a caregiver goes out for a while, a user needs to be able to eat cereal with milk with the help of a self-feeding robot. The water supply tool should be located next to the user’s body. The meal tray must have a cover to protect the food from dust contamination. The cost should be reasonable, e.g., the price should be between US$1800 and $2700. Obviously, a low-cost system is preferred. The feeding robot should be able to deal with noodles. The feeding robot should be able to accommodate the posture of the user. Finally, the feeding robot should be lightweight.
We concentrate on rice handling. We do not take into account the handling of soup in this development. We will handle the requirements of feeding Korean soup in a future version’s design. Instead of handling Korean soup via a self-feeding robot, a user drinks soup stored in a cup. Generally, we assume that a user drinks soup or water through a straw.
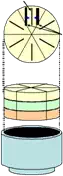
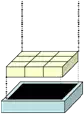
Technically, we considered four types of feeding robots in order to ensure that it can grip and release boiled rice effectively, as shown in Fig. 3.
In the first concept, a number of bowls are located in front of a user’s mouth, and the food is presented by the spoon with a short traveling distance. For example, if there are three bowls, one bowl has rice and two bowls have side dishes. However, two side dishes are not enough to constitute a satisfying meal. In general, Korean people eat three or four side dishes with boiled rice at a time. Therefore, we need four or five bowls.
(a) First concept (b) Second concept


(c) Third concept (d) Fourth concept
Fig. 3. Design concepts of a feeding robot. (Third concept is chosen.)
In the second concept, the bowls are located in the upper front of a user’s mouth, and then the food drops from the bottom of a bowl. The food is placed in the spoon by a dropping motion, and then the spoon approaches the user’s mouth. This method requires the mechanism of food dropping on the spoon. This method could be suitable for a bite-sized rice cake.
In the third concept, the system with a food tray is located on a table. The robotic arm picks up food and then moves it to a user’s mouth. These tasks are divided into two steps: one is picking up the food and the other is moving the food to the user’s mouth. Two arms can be used to perform the above two tasks, respectively. One of the user candidates pointed out the easy installation of the feeding robots, especially a dual-arm manipulator. This is significant because some caregivers might be elderly people who are not familiar with brand-new machines.
Finally, one bowl is located in front of the user’s mouth. The mixed food with rice is loaded in that bowl. Some users do not like the mixed food, even though they do prefer a simple feeding system.
We decided on the third concept, which is located on a table, based on the opinions of specialists and user candidates.
Design of the feeding robot
We have developed a simple robotic system that has a dual-arm manipulator that can handle Korean food such as boiled rice in an ordinary food container, as shown in Fig. 4. We divide a self-feeding task into two subtasks: picking up/releasing food and transferring food to a user’s mouth. The first robotic arm (a spoon-arm, Arm #1) uses a spoon to transfer the food from a container on a table to a user’s mouth. The second robotic arm (a grab-arm, Arm #2) picks food up from a container and then puts it on the spoon of a spoon-arm.
Gra b-a rm (Arm #2)
Spoon-Arm (Arm #1)
Gripper Spoon
Gripper
 Tra y
Tra y
Fig. 4. Assistive robot for self-feeding. Spoon-arm (Arm #1) uses a spoon to transfer the food from a container to a user’s mouth. Grab-arm (Arm #2) picks up the food from a container and then loads it onto the spoon of Arm #1
The two arms have different functions. The design of the end-effectors of the two arms could be chosen effectively. To pick up or release the food stably, a grab-arm can use an odd-shaped gripper, as shown in the bottom left-hand side of Fig. 4, because that gripper does not need to approach a user’s mouth. However, the end-effector of a spoon-arm has an intact round-shaped spoon to serve food to a user’s mouth safely. If an end-effector has an unusual shape, then it might pose a danger to the user as it approaches his or her face.
The two proposed arms with their different end-effectors mimic Korean eating behavior. Specifically, Koreans use a spoon and steel chopsticks during mealtime, as shown in Fig. 5 (a) and (b). Some people use a spoon and chopsticks simultaneously [Fig. 5 (c)]. In the designed system, the gripper of a grab-arm and the spoon of a spoon-arm take on the roles of chopsticks and a spoon, respectively. Many Korean caregivers pick up food with chopsticks and then put it on a spoon in order to serve food to users such as children and patients. In that sense, the proposed two-armed system stems from Korean eating tools.



(a) (b) (c)
Fig. 5. (a) A spoon for scooping food. (b) Chopsticks for picking up food. (c) A person using a spoon and chopsticks
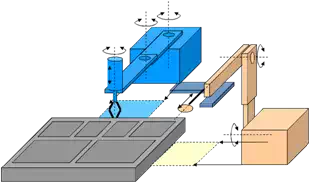
A spoon-arm has two degrees of freedom (DOF) in order to transfer food on the spoon without changing the orientation of the spoon. A grab-arm includes a three-DOF SCARA joint for the planar motion, a one-DOF prismatic joint for the up and down motion, and a gripper. The overall number of DOFs of a dual-arm without a gripper is six, as shown in Fig.
6. The feeding robot can use an ordinary cafeteria tray.
Axis #4
 R4
R4
Axis #3
R3
Arm #2
Axis #5
R5
Axis #6
P2
Connection
Bar
P1*
Axis #2
R2
Gripper
Tray
Spoon
Axis #1
Arm #1
R1

Fig. 6. The joint configuration of a novel feeding robot for Korean foods. P1 (Prismatic Joint
#1) is optionally applied. R = Revolute. P = Prismatic
The feeding robot uses a microcontroller unit to control a spoon-arm and a grab-arm, as shown in Fig. 7. We add a small-sized PC with a touch screen to enable the user to enjoy entertainment and to test various kinds of user interfaces. During mealtime, a user wants to enjoy multimedia such as movies or music. In addition, the small-sized PC has a Windows operating system, and we can effectively add assistive devices for human computer interaction, i.e., switches, a joystick, and biosignal interface devices.
![]()
![]()
![]() Joystick/ Switch
Joystick/ Switch
| MicroArm #1 ControllerUnit | USB | PC (Mobile | ||
| Hub | InternetDevice) | |||
| Arm #2 | Power Unit | (Additional) | ||
| (Battery) | Input Device |
Fig. 7. Block diagram of feeding robot
The microcontroller unit allows a user or a caregiver to select the following: operation modes (automatic/semiautomatic/manual mode), the shape and size of a container, the location of the mouth, the robot’s speed, the time to stay in front of the mouth, and so on. Depending on the types of food, a user also selects the divided grasping region in each container and the grab strength of the gripper of the grab-arm. Our system will be capable of selecting the above parameters. A user can save the parameters of various kinds of food. We expect that in a community, different members will be able to exchange their robots effectively by exchanging their individual parameters via the Internet.
The grasping regions of boiled rice in a bowl could be defined in 3D space because the bowl should be over 50 mm in height. The grasping volume of dishes could be defined as shown in Fig. 8. Our team is making the prototype of the proposed feeding robot. Fig. 9 shows the designed appearance of the proposed self-feeding robot.


Gripper Tip
![]()
![]()
![]() Gripper Direction
Gripper Direction
Gripper Direction
 Gripper Direction
Gripper Direction
Gripper Tip
Gripper Tip
1 4
2 1 6 2 3
 3 4 5
3 4 5
1 4 7
 2 5 8
2 5 8
3 6 9
9 10 11 6 7
15 16 17
Fig. 8. The definition of grasping volume in containers
In order to use a conventional food container, we decided that the length of links of the grab-arm should cover the whole area of a food container. A grab-arm is located behind a container or on the left-hand side of a container. A grab-arm can chiefly be located behind a food container on a standard table, as shown in Fig. 10. The lap board of a bed does not provide enough space behind a food container; therefore, the grab-arm should be located on the left-hand side of a food container.



Fig. 9. The design of a novel feeding robot for Korean food. A spoon-arm (lower left-hand- side figure) for transferring food and a grab-arm (lower right-hand-side figure) for picking up and releasing food
The spoon-arm has two additional variables, namely the motorized prismatic motion toward a user’s mouth, and the manual change of the link length between the first axis and the second axis of the grab-arm. Fig. 11 shows the overall workspace of the spoon of a grab- arm. In accordance with the position of a user’s mouth, the predefined location in front of the mouth is adjusted when the system is installed.
The height of the spoon on the spoon-arm is 250–381 mm with respect to the surface of a table. The height of the spoon-arm depends on the table height. We assume that the height of a table is 730–750 mm. The spoon could be located at a height of 980–1131 mm with respect to the ground. According to the statistics of the Korean disabled, the height of a user’s mouth could be 1018 mm (female) and 1087 mm (male), as shown in Table 1. Thus, the height of the spoon corresponds with the height of the user’s mouth.
| Item | Sitting height on a wheelchair | The distance from a crown to a mouth | Mouse height on a wheelchair |
| Male | 1261 | 174 | 1087 |
| Female | 1187 | 169 | 1018 |
Table 1. Statistics of wheelchair users (unit: mm)
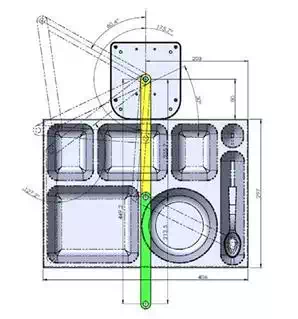
Fig. 10. The configuration of a grab-arm
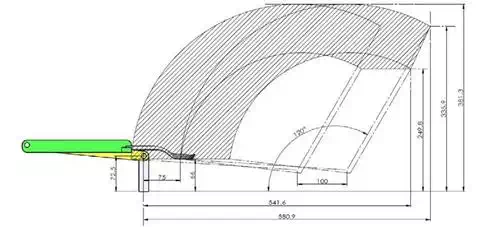
Fig. 11. The work space of a spoon-arm
Basic operation of the self-feeding robot
We built two arm configurations of the developed self-feeding robot: a dual-arm configuration and a single-arm configuration. A dual-arm configuration follows an original design concept using both a spoon-arm and a grab-arm. A single-arm configuration uses
only the spoon-arm, and a caregiver takes the role of the grab-arm. We explain the two arm configurations of the feeding robot in the following sections.
Dual-arm configuration
 A dual-arm robotic system is applied in accordance with an original design concept. If a caregiver prepares food, users can eat the food on the basis of their intentions. A grab-arm picks up the desired food on a food container, and the arm releases the food on the spoon of a spoon-arm. The spoon-arm moves the spoon to the user’s mouth. Then the user can eat the food on the spoon.
A dual-arm robotic system is applied in accordance with an original design concept. If a caregiver prepares food, users can eat the food on the basis of their intentions. A grab-arm picks up the desired food on a food container, and the arm releases the food on the spoon of a spoon-arm. The spoon-arm moves the spoon to the user’s mouth. Then the user can eat the food on the spoon.
Fig. 12. The sequential motions of the self-feeding robot in dual-arm configuration. From the top left-hand side, the robot puts a gripper into a bowl of water and then grasps rice
The self-feeding robots have three operation modes: an automatic mode, a semiautomatic mode, and a manual mode. The automatic mode has a fixed serving sequence of dishes; users only push a start button when they want to eat the next food on a spoon. In a semiautomatic mode, a user can choose the dishes on the basis of their intention. In this mode, a user can have the dishes that they want to eat. In a manual mode, the user can choose food and control the posture of the robot. In all three modes, the user can select the feeding timing when they want eat.
In experiments on handling boiled rice, we observed that releasing rice is as important as picking up rice. The stickiness of the boiled rice can change depending on its temperature. Slightly cool rice is difficult to release from the gripper. In order to solve this problem, the feeding robot automatically puts the gripper of the grab-arm in water before grasping the food. The water is located in a bowl next to the rice. When this is done, the gripper can release the rice on the spoon because the stickiness of the rice has decreased. Fig. 12 shows the whole operation of the self-feeding robot.
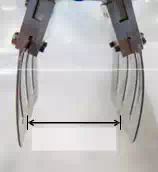
The amount of rice picked up is adjusted on the basis of actual experiments on rice grasping. A gripper’s mechanism is the simple opening/closing of gripper fingers via a linear actuator. The weight of the rice corresponding to one grasping motion increases depending on the open/close width (Fig. 13) of the fingers of the gripper when grasping begins, as shown in Fig. 13. The default open/close width of the gripper is 32 mm in order to grasp an average of 10 g rice. The close width of the gripper makes the grasping force to food. Thus, we can grasp various foods by adjusting the open/close width of the gripper.
 Op en/Close Width of a Grip per Fingers
Op en/Close Width of a Grip per Fingers
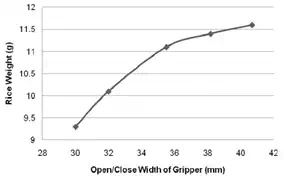 Fig. 13. Amount of rice in a single grasp
Fig. 13. Amount of rice in a single grasp
Single-arm configuration
A spoon-arm could be used independently without a grab-arm, as shown in Fig. 14. The caregiver manually picks up the food on a tray and puts the food on the spoon of a spoon-

Fig. 14. The motions of the self-feeding robot in single-arm configuration. The caregiver picks food up on the spoon of the self-feeding robot, and then the user presses the button to receive the food arm.
The next step is similar to that of the dual-arm robotic arm. A caregiver only provides a user with food when the spoon is empty in the home position. From the perspective of the caregiver, he or she can reduce the amount of time needed to check or wait while the user is chewing. From the perspective of the user, the food can be eaten when he or she wants to eat. Although a user may have difficulty choosing food in an automatic manner, he or she can chew the food sufficiently without considering the next spoon serving from a caregiver. From an economical point of view, the single-arm configuration has a lower cost in comparison with the dual-arm configuration. Applying a spoon-arm has advantages in facilities such as hospitals or nursing homes. One caregiver supports more than one consumer. That means one caregiver can serve food on the spoons of multiple users’ spoon- arms in turn. This configuration is especially useful if the labor cost of a caregiver is not high, as in developing countries.
User test
At first, we designed the self-feeding robot on the basis of users’ opinions in order to develop a practical system. After constructing the prototype of the self-feeding robot, we performed a user test using seven people with disabilities via the developed self-feeding robot. Participants used the self-feeding robot to eat Korean food, and we collected feedback.
Users’ overall feedback on the self-feeding robot
In the users’ opinions, a self-feeding robot could be useful when a user stays at home alone. The self-feeding robot can be used in two situations: one is solitary eating and the other is eating together. The most important role is in supporting self-feeding without a caregiver when people with disabilities stay in their homes alone and caregivers prepare the food in advance.
Some users prefer using a large spoon. For example, a spoon could be a Chinese-style spoon. If a spoon is large, then it can be used to feed wet food. However, a female user could prefer to use a small-sized spoon. The size of the spoon should be customized according to the user preferences. We will consider several spoons with various sizes as well as various depths. Users sometimes request quick motion of the robotic arm. A user wants to be able to adjust the motion speed of the self-feeding robot. The adjusting speed should be customized to the user.
The spoon should tilt to the user’s mouth in order to unload the food on a spoon easily
when the spoon arm is positioned in the user’s mouth. Technically, the spoon should tilt to a user with cerebral palsy because such a user can move his/her head to a limited extent. If the self-feeding robot does not have a tilting function, then the user will struggle to eat the food on the spoon. Specifically, if the robot has a range detection sensor around the spoon, then the robot could move more intelligently in front of the user’s mouth. That means a spoon automatically tilts in front of a user’s mouth. If a user’s mouth moves, the preprogrammed motion is not suitable. If a spoon tilts in the wrong position, food could drop down on the floor. Some people with cerebral palsy or muscular disease have trouble moving their neck, and thus the tilting function of a spoon should be an option.
Users and experts want to eat food comfortably using a spoon. For instance, the proposed system moves the spoon in front of the user’s face. At that time, the spoon moves to the user’s mouth along the sagittal plane, as shown in Figs. 15 (a) and (b). Some users complain about a threatening feeling when the spoon moves on the sagittal plane. If the spoon approaches a user’s mouth from the side, then a user can feel safer. Those motions are similar to most people’s motions when they eat food. In addition, a user wants to touch the side surface of a spoon. As a remedy, we will consider how the spoon approaches, as shown in Figs. 15 (c), (d), and (e). However, the sideways approach may require a large installation area for the self-feeding robot.
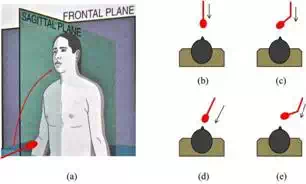
Fig. 15. Spoon approaching modes. (a) The sagittal plane on which a spoon moves. (b), (c), (d), and (e) represent the top view of a spoon when a robot approaches a user’s mouth. The red object means a spoon. (c), (d) and (e) are more comfortable then (b)
A spoon should have a safety function because the spoon frequently comes in contact with a user’s mouth. A spoon can be fixed at the tip of an arm with a spring as a component to guarantee safety. The spoon can be connected to magnets. When a large force acts on the spoon, the magnet’s connection with the spoon could be detached for the user’s safety. A user who has spasticity needs the compliance of a spoon.
Users request a smoother motion of a spoon when it contains food. In addition, the vibration of a spoon should be reduced at that time.
Users want a small-sized self-feeding robot for easy installation on a desk. In addition, a user wants to be able to adjust the spoon level of the self-feeding robot. For example, a user who uses a power wheelchair has various height levels from a table. When users first use the self-feeding robot, the level of the spoon on the robotic arm should be adjustable.
As a basic function, food rarely drops on a table when a user fails to eat the round-shaped food. When a user eats food that is too stiff, grasping failure occurs. Therefore, we consider the motion, i.e., the speed, of a spoon as well as the shape of a spoon.
Some users want to eat rice with a side dish simultaneously. In general, the disabled person who lives alone and receives a caregiving service usually eats rice and a side dish on one spoon at the same time. Some people eat rice mixed with side dishes. The self-feeding robot should mimic that task. The self-feeding robot optionally puts two kinds of food, i.e., rice and a side dish, on a large spoon simultaneously.
The spoon should be returned to the home position after a predefined time interval. The robot has two ways to return to the home position of a spoon: one is by making an input signal, and the other is determining a time interval.
Sometimes a robot should regrasp food in order to avoid grabbing too much of a side dish. When a robot tries to grab some curry rice, the gripper shape should be changed. The gripper should be cleaned frequently. The amount of grabbed food could be adjustable. A stop or pause function is required.
Other comments are as follows: the robots should be less noisy, have a small-sized input device, serve water, and enable users to eat Korean soup. Users who do not have experience eating food by themselves have a hard time using a self-feeding robot for the first time. Such a person needs to be trained on how to use it. Some users want to eat noodles, such as spaghetti. Most users wish to use a low-cost feeding robot.
The filtering of an involuntary input signal of a user should be considered. For instance, in order to reduce malfunctions, a user’s input could be ignored immediately after a previous input. One user who can push a button by himself prefers to use buttons rather than joysticks. One user prefers using a small-sized joystick. Two joysticks are better than one joystick with buttons. The length of a joystick should be adjustable. Buttons should be large sized. The operation without a PC is required. A user who has limited head motion likes to use the long joystick because that user cannot make a fine motion. The unification of an input device of a wheelchair and a self-feeding robot should be considered. Wireless input devices are preferred.
Discussion of a single-arm configuration
In the single-arm configuration, the caregiver picks food up instead of the grab-arm and then loads food on a spoon. The user makes an input signal to move the spoon to the user’s mouth. After the user eats food on a spoon, it returns to the home position upon receiving a command or some time interval, as with a dual-arm configuration.
The single-arm configuration is useful to a caregiver as well as a user. From the perspective of a user, the feeding timing could be changed freely on the basis of a user’s intention. The user can chew food sufficiently. When a user watches television, she leisurely eats food. Some users complain about a single-arm configuration. That means a caregiver must stay with a user even though the single arm is used. The single-arm configuration is useful for a caregiver when a user has a meal with his family because the caregiver does not need to move food to the user’s mouth. Thus, a caregiver likes to use the single-arm configuration.
The users and caregivers are satisfied even though picking up food should be performed manually. Food frequently drops down on the floor when a caregiver serves food to the user’s mouth. However, a user can reduce the instances of dropping food in the case of a single-arm configuration because the spoon is fixed on the spoon-arm and thus the user can estimate the spoon posture correctly.
Input devices
A system should be easy to control for people with disabilities and the elderly. Many users have only head motion, and thus the importance of input devices was mentioned.
In this study, we analyzed the self-feeding robot on the basis of two input devices, namely buttons and joysticks, as shown in Fig. 16. Most input devices are developed for hand manipulation. If a user has hand function, then the easiest way is to use the system is with his or her hands. That means the simplest input device is a set of buttons. However, when a user only uses neck motion to make a control input, he or she has difficulty handling input devices with dexterity. Table 2 shows the properties of the input devices.

 After modification
After modification
(a) (b)
Fig. 16. Input devices of a self-feeding robot. (a) Buttons, (b) Joysticks
| Input Device | Buttons | Dual Shock Type Joypad |
| # of Used Buttons | 7 | N/A |
| # of Used Joysticks | N/A | 2 |
| Length of Joystick (mm) | N/A | 53 |
| Gap between Joysticks (mm) | N/A | 44 |
| Angles of Joystick (degrees) | N/A | ±25 |
| Connection | Wire | USB |
Table 2. Input devices for the self-feeding robot
Buttons
The self-feeding robot has a basic input device consisting of a set of buttons. We usually use six buttons that correspond with start, return, and four directions. The buttons were originally developed to check the basic operations of the self-feeding robot. However, quadriplegics who can only move their neck and head would have difficulty pushing the button with their chin. Because the buttons are out of the field of view, the user has a hard time knowing where the buttons are and whether or not they are pushed. Additionally, pushing these buttons requires excessive force and can result in muscle fatigue in a user’s neck. Thus, a user who uses his or her neck would have difficulty pushing the buttons. Users prefer to use joysticks rather than buttons. On the basis of users’ opinions, we tested input devices that have joysticks.
Joysticks
Two joysticks are employed. Originally, it was determined that a user wants to use two joysticks rather than one joystick and buttons. The length of the joystick is modified from 10 to 53 mm according to users’ opinions. Because of the gap between the two joysticks, a user can easily manipulate one of the joysticks without any resulting malfunction of the other joystick.
The length of the joystick depends on user preference. Some users prefer a long joystick while others like a short one. Most users prefer the wide gap between the two joysticks because a short gap can result in the malfunction of the unused joystick. The moving angles of a joystick are ±25°. Users express satisfaction with the flexibility of the joystick and its silicon cover, which can be connected to the user’s skin.
Satisfaction evaluation of the self-feeding robot
We carried out the user tests with user candidates, including people with spinal cord injuries. After they actually ate food using the developed self-feeding robot, we collected their feedback to determine their satisfaction score in accordance with input devices. The users ate food using the self-feeding robot with each of the input devices. The results of the users’ feedback pertained to the self-feeding robot as well as the input devices. The users rated their satisfaction with the input device activity on a scale of 1 to 10, as with the Canadian Occupational Performance Measure (Pendleton, 2001). A score of 10 indicates the highest level of satisfaction. Most users were satisfied with the self-feeding system that had a dual joystick, as shown in Table 3. This indicates that the use of joysticks is more comfortable than that of buttons. In addition, the self-feeding system operates well. Based on the analysis of users’ feedback, the key factors affecting the handling of joysticks with regard to a user’s neck motion are as follows: the distance between the joysticks, the moving angle of the joysticks, and the length of the joysticks. We will perform a comparison study between commercialized feeding systems and the developed system.
| Input Device | Buttons | Joysticks |
| SCI #1 | 6 | 8 |
| SCI #2 | 8 | 8 |
| SCI #3 | 1 | 8 |
| SCI #4 | 1 | 8 |
| SCI #5 | 1 | 6 |
| SCI #6 | 1 | 7 |
| SCI #7 | 1 | 8 |
| Average Score | 2.7 | 7.6 |
Table 3. Satisfaction score of input devices when users eat food via a self-feeding robot
(max = 10)
Concluding remarks
We have developed a novel assistive robot for self-feeding that is capable of handling Korean food, including sticky rice. This paper presents the overall operation of the self- feeding robot. The proposed robot has three distinguishing points: handling sticky rice, using an ordinary meal tray, and a modular design that can be divided into two arms. Users are people with physical disabilities who have limited arm function. During the development of the robot, we considered the feedback provided by several users and experts. In addition, the user candidates tested the actual the self-feeding robot. It was determined that the input device has the most important role. Many users prefer a dual joystick for self-feeding. Most of the users who participated in the experiments gave us positive feedback. Some users were impressed that they were able to eat their desired food when they wanted to eat it. In future work, we will add several functions to the robot, including improving the reliability of basic operations and adding a safety feature. We will also simplify the system components and perform user evaluations.